
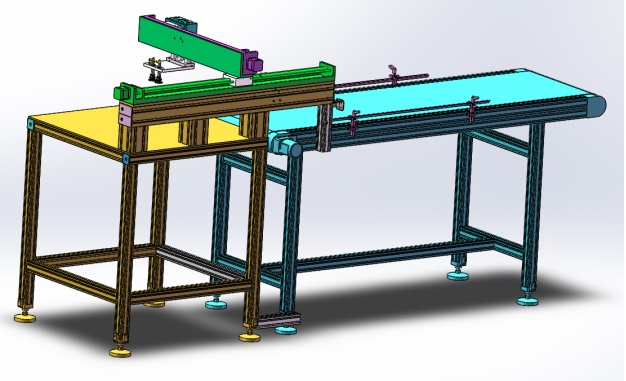
工作原理:
懸臂式裝箱機采用步進驅動電控系統,使用標準的XY滑軌或滑臺,將輸送線上的產品逐一計數裝箱,滿箱提示輸出信號。產品運行在指定位置,輸送線停止,真空吸附取走之后,輸送線繼續運行。XY滑臺均采用步進電機,因而,本設備可以實現定位裝箱,將各個小件裝進指定的模具盒內。裝箱機械手,懸臂機械手,徐州機械手,徐州碼垛機械手,徐州堆垛機械手
主要配置:
步進電控系統、真空吸附系統、氣動控制、工業鋁型材框架和結構件等。
適用行業:
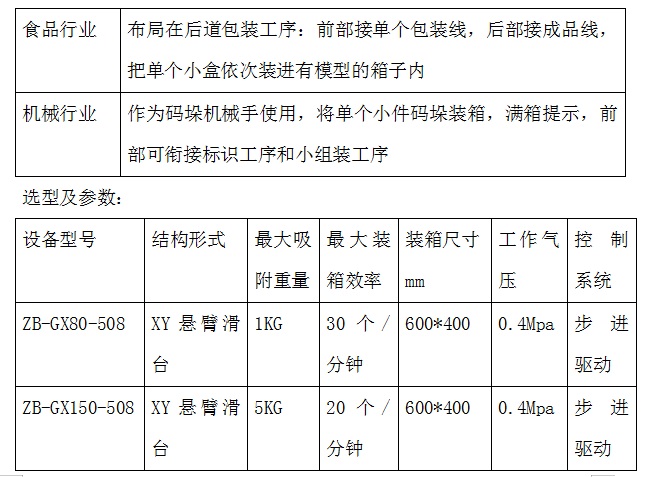
食品行業 | 布局在后道包裝工序:前部接單個包裝線,后部接成品線,把單個小盒依次裝進有模型的箱子內 |
機械行業 | 作為碼垛機械手使用,將單個小件碼垛裝箱,滿箱提示,前部可銜接標識工序和小組裝工序 |
選型及參數:
設備型號 | 結構形式 | 最大吸附重量 | 最大裝箱效率 | 裝箱尺寸mm | 工作氣壓 | 控制系統 |
ZB-GX80-508 | XY懸臂滑臺 | 1KG | 30個/分鐘 | 600*400 | 0.4Mpa | 步進驅動 |
ZB-GX150-508 | XY懸臂滑臺 | 5KG | 20個/分鐘 | 600*400 | 0.4Mpa | 步進驅動 |

管理員
該內容暫無評論